Q-Learning 简介
强化学习(Reinforcement Learning)是一种用于模拟现实世界的算法,而其中的一个重要的组成部分是 Q-Learning。
假设有一系列「状态」(state)组成的环境,在每一个状态中都可以采取一种「动作」(action)到达下一个状态。 这些状态并不都是相同的,根据实际应用,不同的状态有不同的「奖励」(reward),而且存在终止状态。我们的目标是从任意初始状态出发,到达终止状态,且所获得的奖励最大。
Q-Learning 就是这样一种决策算法,帮助我们在每个状态决定应该采取何种动作,才能最终得到最大奖励。
算法描述
Q-Learning 算法的核心是维护一张 Q 表,它的每一行对应一个状态,每一列对应一种动作,每个值代表了这个状态下采取这种动作最终可以得到的最大奖励。Q-Learning 会经过多次尝试去更新其中的值,不断试错,从而“学习”到外部环境的机制。
步骤如下:
- 随机初始化 $Q(s, a)$
- 重复以下步骤,每一次重复记作一次 episode:
- 初始化状态 s
- 重复以下步骤,每一次重复记作一次 episode 的一步(step):
- 选择状态 s 下要采取的动作 a(依据一定的策略,如 $\epsilon$-greedy)
- 执行动作 a,得到奖励 r,到达下一状态 s’
- 更新 Q 表:$Q(s,a)\leftarrow Q(s,a)+\alpha[r+\gamma max_{a’}Q(s’,a’)-Q(s,a)]$
- 更新状态:$s\leftarrow s’$
- 当 s 为终止状态,停止
要说明的:
- 在每个 step 中,要首先根据一定策略选择要执行的动作。其中 $\epsilon$-greedy 策略是在一定概率下按 Q 表的最优值选择动作,其他情况下随机选择动作。
- 在更新 Q 表的步骤中,$r+\gamma max_{a’}Q(s’,a’)$ 是当前得到的最大奖励值(当前状态 s 采取动作 a 获得的奖励 + 下一状态 s’ 获得的最大奖励(Q 表预测的 )),而 $Q(s,a)$ 则是 Q 表预测的最大奖励值。将二者作差并乘上一个学习率 $\alpha$,叠加到现有的 Q 表中,就完成了 Q 表的一次更新。
- 上面中出现的 $\gamma$ 是衰减率,为 0 即不考虑未来奖励如何,只考虑当前奖励最大;为 1 即考虑所有未来的奖励;介于 0 和 1 之间则考虑的程度随 $\gamma^2$ 不断衰减。
代码演示
根据上面数学角度的分析,不难看出实际需要处理的就是两个部分:选择动作和更新 Q 表。下面用 python 演示这两部分。
__init__
初始化函数主要为建立 Q 表:
1 | def __init__(self, actions, learning_rate=0.01, reward_decay=0.9, e_greedy=0.9): |
其中 actions 为动作的集合(list 类型),需要用到 pandas 和 numpy 库。
choose_action
choose_action 是选择动作的函数,需要接收一个参数作为当前状态:
1 | def choose_action(self, observation): |
为方便后续处理和操作,将参数转换为 str 类型:
1 | observation = str(observation) |
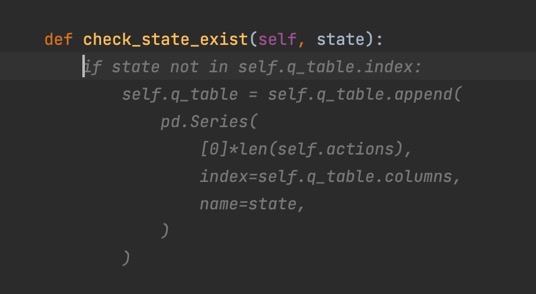
接下来需要选择要执行的动作了,但我们首先要判断参数对应的状态是否在 Q 表中,需要引入函数 check_state_exist:
1 | def check_state_exist(self, state): |
逻辑很简单,当这个状态不在 Q 表中时,我们就把它加入 Q 表。
若此处出现报错 TypeError: unhashable type: 'list',应该是把 list 类型的 state 作为参数传了过来。list 类型是不可以作为 key 的,注意需要转换为 str 类型。
在 choose_action 中调用函数 check_state_exist 进行判断:
1 | self.check_state_exist(observation) |
接下来就可以进行动作的选择了!
注意之前提到的 $\epsilon$-greedy 策略,我们需要在一定的概率下选择 Q 表中最优值:
1 | if np.random.uniform() < self.epsilon: |
回忆一下,Q 表每一行对应一个状态、每一列对应一种动作。所以在 Q 表中选择动作,首先要找到当前的状态:
1 | state_action = self.q_table.loc[observation, :] |
然后就可以找这一行中的最大值对应的动作了。
但是这里有一个问题,如果有多个相同的最大值呢?这种情况下如果我们直接判断 argmax,返回的将永远是第一个最大值,永远不会遍历到后面的最大值对应的动作。所以这里我们需要随机选择一个最大值来避免这种情况:
1 | action = np.random.choice(state_action[state_action == state_action.max()].index) |
这就是基于 Q 表选择的动作了。
在另一个分支进行随机选择:
1 | action = np.random.choice(self.actions) |
最后返回执行的动作:
1 | return action |
完整代码:
1 | def choose_action(self, observation): |
learn
learn 是学习的过程,也就是更新 Q 表的函数,需要接收当前状态、当前执行的动作、获得的奖励和下一个状态 4 个参数:
1 | def learn(self, s, a, r, s_): |
同样对状态做字符串化处理,并判断下一个状态是否在 Q 表中:
1 | s = str(s) |
根据上一部分的分析,更新 Q 表需要知道当前选择对应的最大奖励值($r+\gamma max_{a’}Q(s’,a’)$,记作 q_target)和 Q 表预测的最大奖励值($Q(s,a)$,记作 q_predict)。
其中 q_predict 比较容易得到:
1 | q_predict = self.q_table.loc[s, a] |
而 q_target 需要判断下一状态是否到了最终状态,如果是,则 q_target 直接为当前获得的奖励 r,否则根据公式计算:
1 | if s_ != 'terminal': |
更新 Q 表:
1 | self.q_table.loc[s, a] += self.lr * (q_target - q_predict) |
参考
强化学习 (Reinforcement Learning) | 莫烦Python
鸣谢
GitHub Copilot · Your AI pair programmer